
Александр Кораблев
В кратком обзоре приведены основные сведения о тиристорах, а также показаны некоторые примеры их использования на практике.
Введение
История создания тиристора началась в 1955 г., когда была опубликована статья исследователей знаменитой Bell Telephone Laboratories Джона Луиса Молла (John Louis Moll), Морриса Таненбаума (Morris Tanenbaum), Джеймса/Джима М. Голди (James/Jim M. Goldey) и Ника Холоньяка (Nick Holonyak), в которой описывался управляемый полупроводниковый выпрямитель (Silicon Controlled Rectifier, SCR).
В 1956 г. в этой же лаборатории впервые была получена описанная в статье кремниевая структура p-n-p-n-типа. В следующем году на основе этой структуры Роберт Ноэль Холл (Robert Noel Hall) и Фрэнк Уильям Гутцвиллер (Frank William Gutzwiller), инженеры электротехнического концерна General Electric, создали первые образцы тиристора (SCR). Позиционное обозначение тиристора на электрической схеме показано на рис. 1.
Рис. 1. Позиционное обозначение тиристора на электрической схеме
С момента появления тиристоров прошло немало времени, появились новые силовые полупроводники (IGBT, MOSFET), но до сих пор тиристоры остаются единственными силовыми полупроводниковыми приборами, способными коммутировать электрические цепи с напряжением несколько тысяч вольт и токами в несколько тысяч ампер.
Принцип работы тиристора
Принцип работы тиристора схож с принципом работы динистора, достаточно подробно описанным в статье «Динисторы. Принцип действия и применение». Поэтому мы не будем повторяться, лишь выделим принципиальное отличие между этими двумя приборами. Упрощенная структура тиристора и схема его включения показаны на рис. 2. Как видно из рис. 1, главным отличием тиристора от динистора является наличие управляющего электрода УЭ, чаще его обозначают символом G. При подаче на электрод УЭ положительного относительно катода импульса p-n-переход p3-n4 смещается в прямом направлении, и через него начинает протекать ток. Затем процессы в тиристоре развиваются по такому же сценарию, как и в динисторе. Отметим, что напряжение Е (рис. 2) должно быть ниже нормируемого напряжения тиристора.
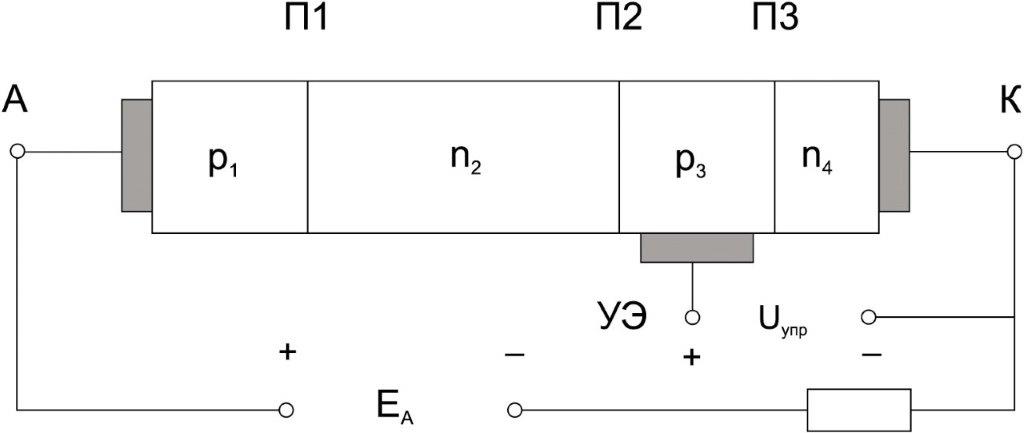
Рис. 2. Упрощенные схемы устройства и включения тиристора
После отпирания тиристора напряжение на управляющем электроде следует снизить до нулевого уровня. Запирание тиристора происходит, когда ток тиристора становится ниже тока удержания IH. На рис. 3 приведена вольт-амперная характеристика тиристора. На ней отмечены значения тока управляющего электрода, при которых происходит включение (открытие) тиристора.
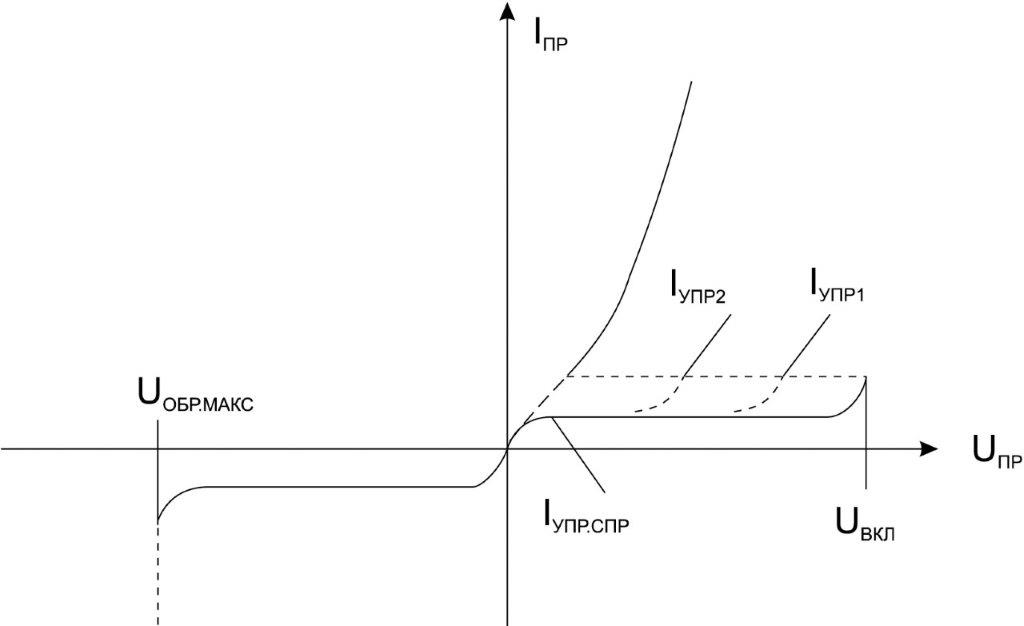
Рис. 3. Вольт-амперная характеристика тиристора
Между токами соблюдается следующее соотношение: IУПР.СПР > IУПР2 > IУПР1. Чем больше ток управления, тем меньше должно быть напряжение анода для включения тиристора. При токе управления IУПР.СПР на вольт-амперной характеристике тиристора отсутствуют участки с отрицательным сопротивлением, поэтому этот ток управления называется током спрямления. Производители тиристоров указывают его в документации. Там же приводится минимальная длительность импульса тока управления.
Перечислим основные параметры тиристора, которые указывают в документации производители:
- максимально допустимый ток в прямом направлении IT(AV);
- повторяющееся пиковое напряжение в прямом направлении VDRM;
- повторяющееся пиковое напряжение в обратном направленииVPRM;
- импульсный ток ITSM;
- I2t;
- максимальная скорость изменения приложенного напряжения dV/dt;
- максимальная скорость изменения прямого тока di/dt;
- ток удержания IH.
Ток IT(AV) определяется как средний ток синусоидальной полуволны частотой 50 Гц. Обычно VDRM =VPRM, именно эти величины напряжения нормирует производитель. Например, у 1200-В тиристора значения VDRM = VPRM = 1200 В. Производители гарантируют, что при этих значениях напряжения VPRM и VDRM не произойдет ни обратного пробоя тиристора, ни его ложного включения.
Импульсный ток ITSM это средний ток синусоидальной полуволны частотой 50 Гц при напряжении 0,6VPRM. Величина I2t позволяет определить значение всплесков тока, когда форма импульса отлична от синусоидальной полуволны, а длительность импульса заметно меньше 10 мс.
Ограничение скорости нарастания прикладываемого напряжения dV/dt определяется паразитными емкостями p-n-переходов. Если скорость нарастания напряжения превысит заданную производителем, возможно ложное включение тиристора. Ограничение скорости нарастания тока di/dt необходимо для защиты тиристора от локального перегрева в момент включения.
Примеры использования тиристора
Тиристоры нашли применение во многих устройствах, и существует множество схем их использования — от простейших регуляторов мощности (диммеров) до сложных многофазных реверсивных регулируемых выпрямителей.
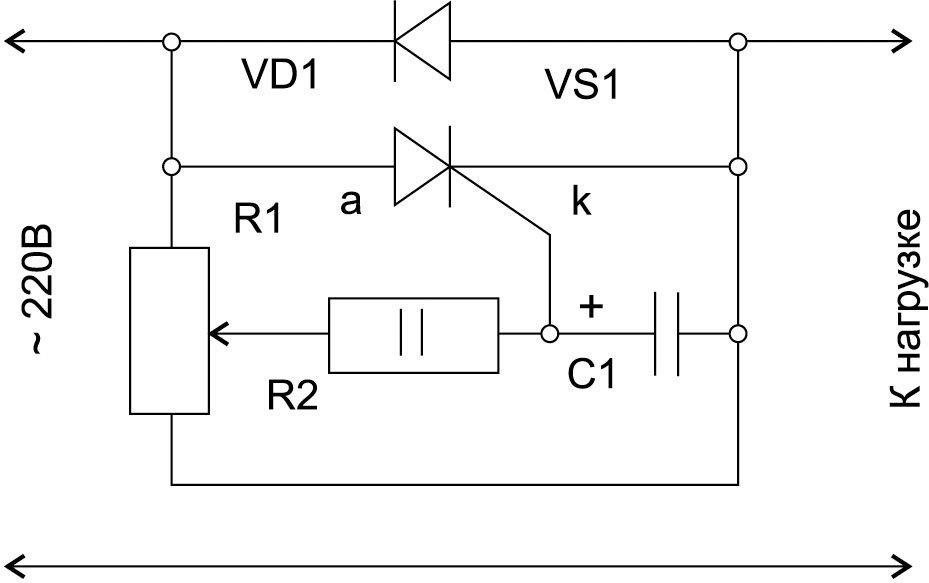
Рис. 4. Схема простейшего регулятора мощности
Схема простейшего регулятора мощности показана на рис. 4. По мере заряда конденсатора С1 возрастает напряжение на управляющем электроде и, следовательно, его ток, что и приводит к включению тиристора. Схема подкупает своей простотой, но может использоваться лишь при небольшой нагрузке. При плавном нарастании напряжения управляющего электрода включение тиристора произойдет при малом токе управления (рис. 3), что приведет к дополнительной потере мощности на тиристоре.
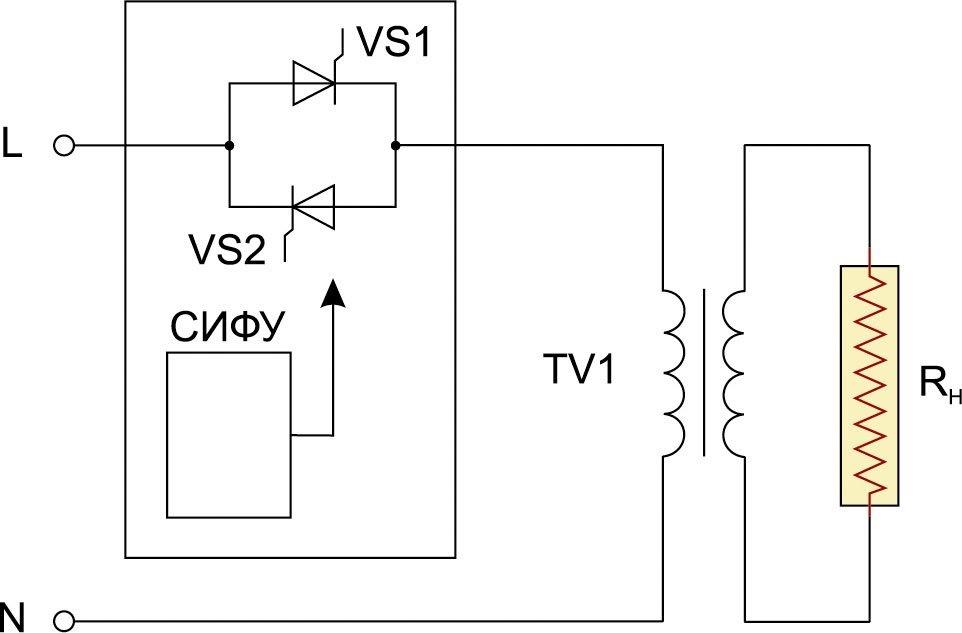
Рис. 5. Структурная схема двухполупериодного регулирования мощности с СИФУ
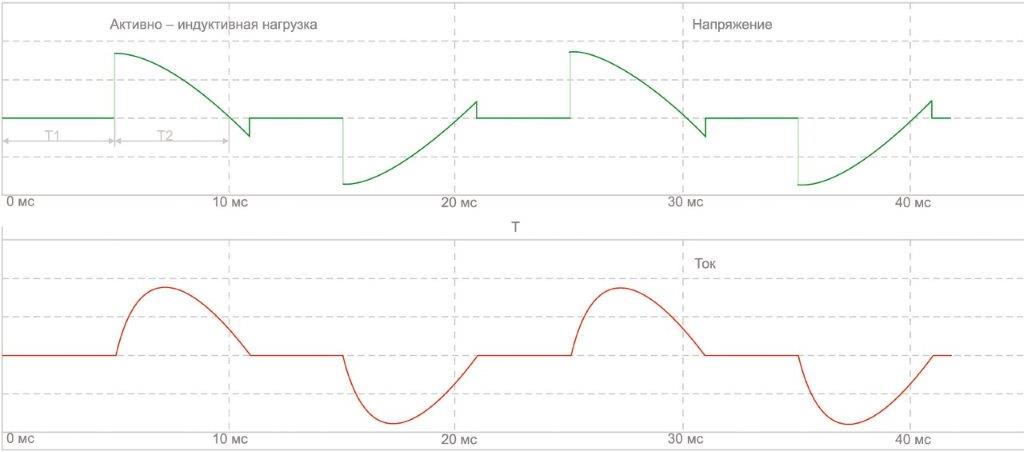
Рис. 6. Временная диаграмма работы схемы двухполупериодного регулирования мощности с СИФУ
Поэтому для управления тиристорами используют специальную систему импульсно-фазового управления (СИФУ), формирующую импульсы управления с крутым фронтом. Структурная схема двухполупериодного регулирования мощности с СИФУ и временная диаграмма работы показаны на рис. 5 и 6 соответственно. Импульс управления поступает на тиристор в конце интервала времени Т1. В данном случае Т1=Т2, угол открытия тиристора отсчитывается от точки перехода напряжения через 0 и в данном случае составляет 90°.
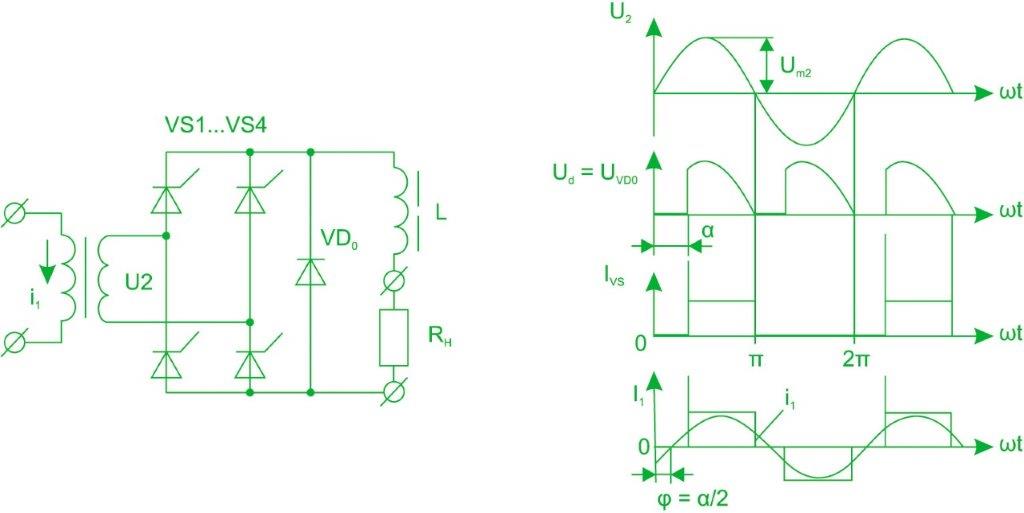
Рис. 7. Схема двухполупериодного выпрямителя и временная диаграмма его работы
Пожалуй, наиболее распространено применение тиристоров в управляемых выпрямителях. На рис. 7 показаны схема двухполупериодного выпрямителя и временная диаграмма его работы. Предполагается, что мост работает на активно-индуктивную нагрузку, постоянная времени которой существенно превышает длительность периода сетевого напряжения, поэтому токи через тиристоры и ток сети I1 имеют прямоугольную форму.
Обратный диод VD0 образует контур протекания тока нагрузки при выключенных тиристорах. Выходное напряжение зависит от угла управления тиристорами α следующим образом:
UVD0 = (U2/Π) × (1+cosα).
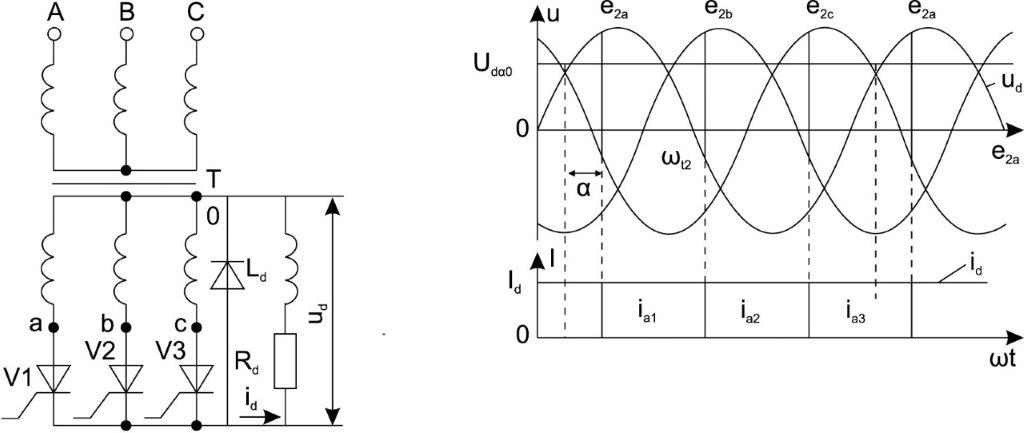
Рис. 8. Трехфазная выпрямительная схема с нулевым проводом (выпрямитель Ларионова)
На рис. 8 показаны трехфазная выпрямительная схема с нулевым проводом (выпрямитель Ларионова) и графики выпрямленного напряжения и тока. Так же, как и в предыдущем случае, предполагается, что постоянная времени нагрузки значительно превышает длительность периода сетевого напряжения. Среднее выпрямленное напряжение на нагрузке вычисляется из следующего соотношения:
UDα0 = UD0 ×cosα = 1,35U2×cosα,
где U2 — действующее напряжение на вторичной обмотке.
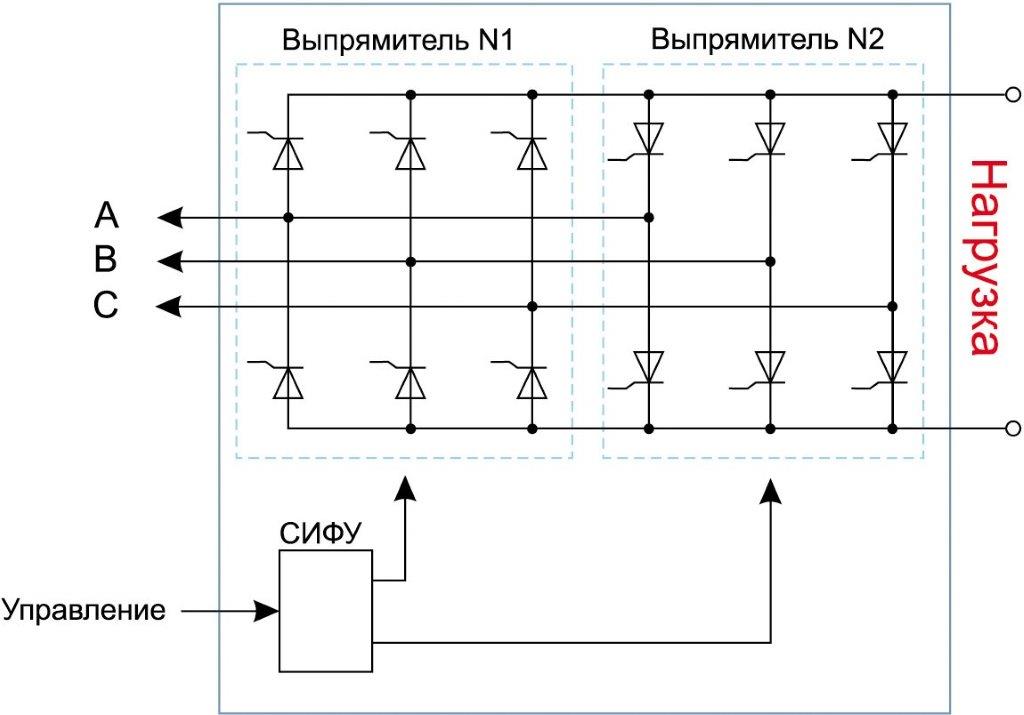
Рис. 9. Трехфазная мостовая реверсивная выпрямительная схема
Трехфазная мостовая реверсивная выпрямительная схема показана на рис. 9. Мостовые выпрямители работают в этой схеме поочередно. Обратные диоды в реверсивной схеме, разумеется, отсутствуют, поэтому переключение мостов возможно только в случае уменьшения тока нагрузки до нуля. В противном случае произойдет короткое замыкание.